
中微半导无刷电机吸尘器方案 | 实测效率55.5%·顺逆风启动
中微半导无刷电机吸尘器方案:CMS32M55/M65系列专用MCU,无感FOC+顺逆风启动,实测效率55.5%,吸入功率271W,支持22万转,覆盖手持/车载/扫地机器人。提供完整测试数据、原理图及调试工具。
无刷电机吸尘器完整解决方案
无感FOC + 顺逆风启动 + 量产级效率55.5%
基于 CMS32M55 / CMS32M65 系列电机驱动芯片,专为手持无线吸尘器、商用扫地机器人、车载吸尘器打造,已服务多家头部品牌并大规模出货。

一、方案概述:直击吸尘器四大痛点
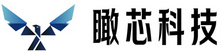
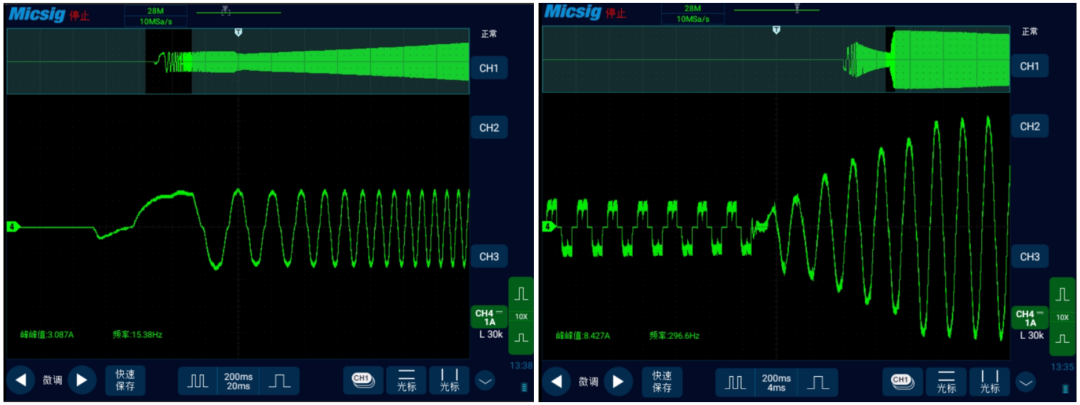
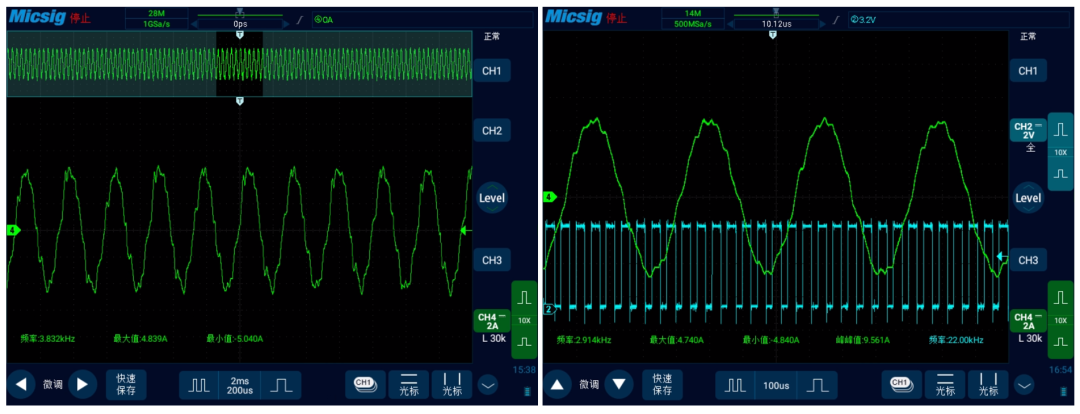
传统吸尘器电机方案普遍存在启动抖动、高速噪音刺耳、堵转烧管、续航不足等问题。中微半导方案采用单电阻无感FOC + 自收敛直接闭环启动算法,同时支持顺逆风启动(电机惯性旋转时无冲击切入闭环),配合相电流平滑补偿和主动弱磁,实现了启动零失败、全速域低噪音、堵转软保护以及高达55%以上的系统效率。
启动可靠性:自收敛算法适应空载/满载/顺风/逆风各种场景,实测2000次启停成功率100%。
静音表现:通过谐波注入与死区补偿,同等转速下噪音比传统方案降低3~5dB。
高转速/高功率:最高支持220,000 RPM以上,功率覆盖50W~750W,满足家用至商用全场景。
完备保护:过欠压、逐波限流、硬件短路保护、堵转识别、堵孔降功率,确保极端工况不损坏硬件。
二、核心芯片规格详解
CMS32M55系列 (代表型号:CMS32M5533EQ040)
▪ 内核:ARM Cortex-M0+ @64MHz,硬件除法器
▪ 存储:32KB Flash + 8KB RAM
▪ 模拟资源:12-bit ADC (1.2Msps) ×16ch,3路PGA,2路运放,2路比较器 
▪ 特色:集成三相互补PWM,死区可编程;工作温度-40~105℃
▪ 封装:QFN40 / LQFP48,外围极简,适合手持吸尘器
CMS32M65系列 (代表型号:CMS32M6536EGE32NA)
▪ 内核:ARM Cortex-M0+ @64MHz,内置反电动势中心点检测电路
▪ 存储:64KB Flash + 8KB RAM
▪ 模拟前端:1.2Msps ADC,4路PGA,3路运放,高精度内部振荡器(±1%)
▪ 高压集成:部分型号内置90V三相半桥预驱,可直接驱动MOSFET
▪ 适合450W~750W商用扫地机器人及高端吸尘器 
芯片选型快速对比表
| 参数项目 | CMS32M5533EQ040 | CMS32M6536EGE32NA |
|---|---|---|
| 内核 | ARM Cortex-M0+ | ARM Cortex-M0+ |
| 存储 | 32KB Flash + 8KB RAM | 64KB Flash + 8KB RAM |
| ADC 速度 | 1.2 Msps | 1.2 Msps |
| 模拟外设 | PGA×2, OP×2, ACMP×2 | PGA×3, ADCLDO, ACMP×2 (含反电动势虚拟中心点) |
| PWM 通道 | 6 通道增强型 | 6 通道增强型 |
| 低功耗 | 运行: ~70 μA/MHz,深度睡眠: ~10 μA | 运行: 70 μA/MHz,深度睡眠: 10 μA |
注:CMS32M6536 在模拟前端和存储资源上更具优势,适合复杂算法及大功率场景;CMS32M5533 则提供极致性价比,满足手持吸尘器高量产需求。
三、关键算法特性详解
顺逆风启动能力:吸尘器在短暂停机后叶轮仍会旋转数秒,传统方案可能因无法识别旋转方向而导致启动失败或反转。中微方案通过高频注入与滑模观测器融合,在电机静止或旋转状态下均可精确估算转子位置和速度,实现正向/反向无冲击切入闭环。实测支持±5000rpm范围内的顺逆风可靠启动。
恒功率控制 + 堵孔自适应:当吸尘器吸口堵塞时,风道阻力急剧增加,若不限制功率会导致电机过热甚至烧毁。方案采用功率闭环,实时监测输入功率并动态限制,同时通过转速变化率快速识别堵孔状态,主动降低PWM占空比,待用户清理后自动恢复。
弱磁扩速与效率优化:针对220,000rpm以上超高转速需求,算法中嵌入MTPA(最大转矩电流比)与弱磁控制,在保证稳定性的前提下扩展转速范围,同时维持高效率区间。
四、实测性能数据(基于IEC 60312-1标准)
4.1 CMS32M5533 手持吸尘器方案 (21.6V / 300W级)
| 参数分类 | 详细规格 | 备注 |
|---|---|---|
| 样机编号 | 1# | - |
| 样品型号 | H45 300W 21.6V | 直流无刷电机 |
| 额定参数 | 21.6V / 0.0Hz / 300.0W | - |
| 测试环境 | 14.5℃ / 52.6%RH / 98.69kPa | 温度/湿度/大气压 |
| 测试标准 | IEC 60312-1 B | |
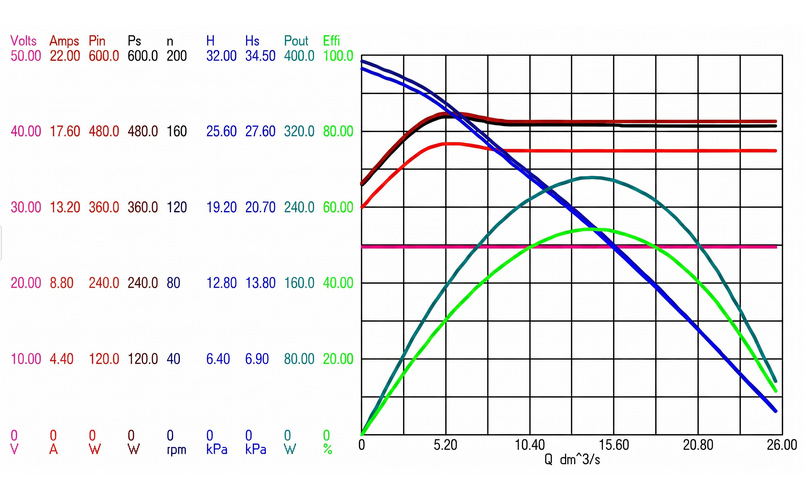
效率曲线预留图
| 孔径(mm) | 电压(V) | 电流(A) | 输入功率(W) | 流量(dm³/s) | 真空度(kPa) | 吸入功率(W) | 效率(%) |
|---|---|---|---|---|---|---|---|
| 50.0 | 21.16 | 13.86 | 293.48 | 22.27 | 0.21 | 4.83 | 1.57 |
| 16.0 | 21.16 | 13.87 | 293.49 | 15.21 | 9.67 | 151.87 | 49.50 |
| 13.0 | 21.16 | 13.86 | 293.71 | 11.88 | 13.77 | 168.95 | 55.02% |
| 10.0 | 21.16 | 13.90 | 293.41 | 7.92 | 17.67 | 144.49 | 47.11 |
| 6.5 | 21.17 | 10.30 | 218.06 | 3.42 | 18.57 | 63.31 | 27.79 |
| 0.0 | 21.17 | 6.98 | 147.78 | 0.00 | 18.21 | 0.00 | 0.00 |
| 最大值 | 21.17 | 13.90 | 293.71 | 22.27 | 18.57 | 168.95 | 55.02 |
4.2 CMS32M6536 高性能方案 (25.2V / 450W级)
| 孔径(mm) | 电压(V) | 电流(A) | 输入功率(W) | 流量(dm³/s) | 真空度(kPa) | 吸入功率(W) | 效率(%) |
|---|---|---|---|---|---|---|---|
| 30.0 | 24.75 | 18.13 | 488.40 | 25.59 | 2.22 | 56.82 | 11.63 |
| 19.0 | 24.73 | 18.13 | 488.73 | 20.91 | 9.51 | 198.86 | 40.69 |
| 16.0 | 24.74 | 18.13 | 488.66 | 17.83 | 14.05 | 250.45 | 51.25 |
| 13.0 | 24.73 | 18.15 | 489.18 | 13.77 | 19.72 | 271.59 | 55.52% |
| 6.5 | 24.68 | 18.43 | 497.88 | 4.27 | 31.09 | 132.65 | 26.64 |
| 0.0 | 24.66 | 14.58 | 394.12 | 0 | 33.94 | 0 | 0 |
五、应用场景与配套开发支持
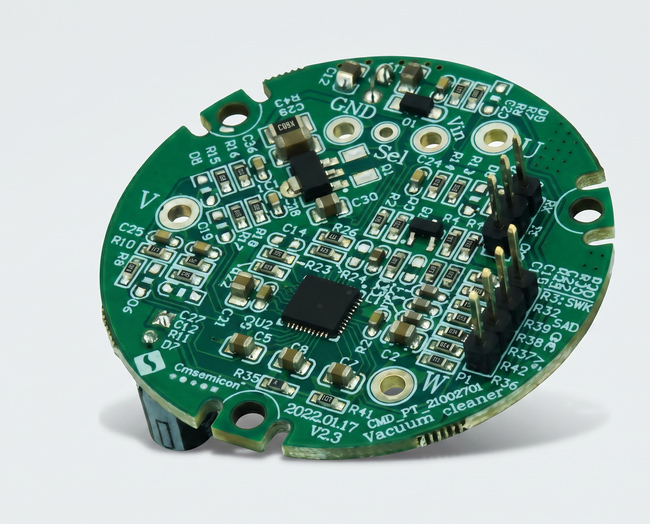
手持无线吸尘器
推荐芯片:CMS32M5533
功率150W~350W,优化低功耗模式与中低档噪音,提供超紧凑参考设计(PCB 35×25mm)。
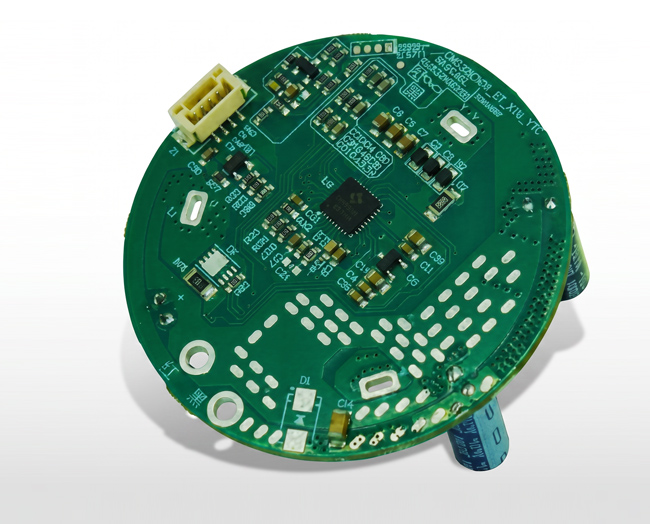
商用扫地机器人
推荐芯片:CMS32M6536
功率400W~750W,重点增强地毯模式恒功率控制及防堵转能力,已通过2000小时寿命测试。
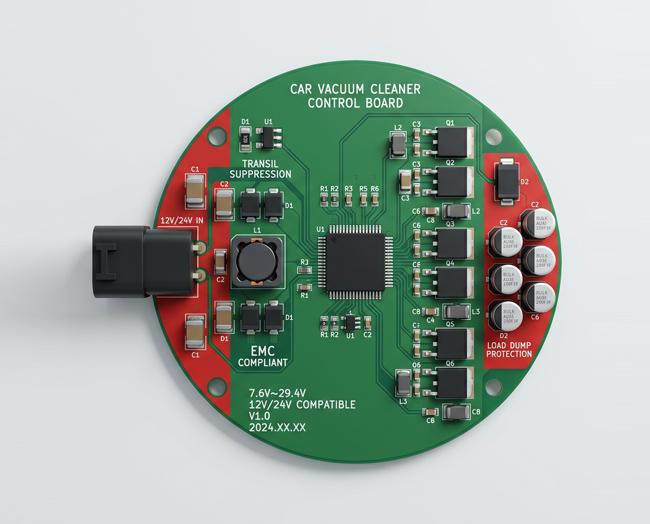
车载吸尘器
宽电压输入7.6V~29.4V,兼容12V/24V点烟器,内置抛负载抑制,通过车载EMC测试。
开发工具链:中微提供“Motor Studio”专业调试上位机,支持实时波形监控、参数辨识、一键自动标定,同时提供离线烧录器及产线校准方案。客户可获取完整硬件原理图、PCB源文件、软件库及API说明,显著缩短产品上市周期。
六、方案价值与量产
中微半导无刷电机吸尘器方案已累计出货超800万颗电机控制芯片,服务于国内外多家知名清洁电器品牌,产线不良率低于100ppm。方案在性能上对标国际一线厂商,同时提供更具竞争力的BOM成本和本土化快速响应技术支持。CMS32M65系列曾获行业电机控制芯片创新奖,是国产替代的理想选择。
对比优势总结:
- 集成度远高于“通用MCU+外置运放”方案,外围元件减少40%
- 自收敛+顺逆风启动,彻底解决吸尘器启动卡顿和反转问题
- 硬件级保护响应速度<200ns,杜绝炸机风险
- 完整生态:从参考设计、调试工具到量产校准,一站式服务
/**
* @file vacuum_motor_foc.c
* @brief 中微半导吸尘器无感FOC控制核心模块
* @version V1.0
* @date 2026-05-16
* @note 适配 CMS32M5533EQ040 / CMS32M6536EGE32NA
* 支持顺逆风启动、恒功率限制、堵孔保护
*/
#include "CMS32M55.h"
#include "motor_define.h"
#include "foc_algorithm.h"
/* 全局变量 ------------------------------------------------------------*/
volatile uint16_t target_speed_rpm = 80000; // 目标转速 8万转/分钟(典型吸尘器档位)
volatile uint16_t actual_speed_rpm = 0;
volatile int16_t phase_current_A = 0, phase_current_B = 0; // 相电流 (0.01A单位)
volatile uint16_t dc_bus_voltage_mV = 0; // 母线电压 mV
volatile uint8_t start_flag = 0;
volatile uint8_t stall_protect_cnt = 0;
/* 私有函数声明 ------------------------------------------------------*/
static void PWM_Init(void);
static void ADC_Init(void);
static void FOC_Loop(void);
static void Speed_PI_Control(void);
static uint8_t Check_Stall_Condition(void);
/**
* @brief 电机驱动外设初始化 (PWM互补,死区,ADC)
*/
void Motor_Init(void)
{
// 1. 时钟使能
CLOCK_EnableModule(CLK_PWM1 | CLK_ADC | CLK_TIMER0);
// 2. PWM配置:中央对齐,互补输出,死区 2.0us @64MHz
PWM_Config_t pwm_cfg = {
.mode = PWM_MODE_CENTER_ALIGNED,
.deadtime_ns = 2000, // 死区2us
.freq_hz = 20000, // 20kHz 开关频率,降低噪音
.polarity = PWM_ACTIVE_HIGH
};
PWM_InitModule(PWM_UNIT1, &pwm_cfg);
PWM_EnableOutput(PWM_CH_U | PWM_CH_V | PWM_CH_W);
// 3. ADC配置:双电阻采样,PWM中点触发
ADC_Config_t adc_cfg = {
.resolution = ADC_12BIT,
.sampling_rate = 1200000, // 1.2Msps
.channels = ADC_CH_A | ADC_CH_B | ADC_CH_VBUS,
.trigger_source = ADC_TRIG_PWM_MIDDLE
};
ADC_Init(&adc_cfg);
ADC_EnableDMA(1);
// 4. 开环强拖参数 (用于自收敛启动前的位置检测)
FOC_SetOpenLoopParams(1000, 500); // 初始电流1000mA,斜坡时间500ms
}
/**
* @brief 无感FOC主循环,在PWM中断或主循环中调用
*/
void Motor_Run(void)
{
if (!start_flag) return;
// 读取ADC值:两相电流 + 母线电压
phase_current_A = ADC_GetValue(ADC_CH_A); // 已转换为实际电流 (0.01A)
phase_current_B = ADC_GetValue(ADC_CH_B);
dc_bus_voltage_mV = ADC_GetValue(ADC_CH_VBUS);
// 估算转子位置和转速 (滑模观测器+锁相环)
FOC_UpdateEstimator(phase_current_A, phase_current_B, dc_bus_voltage_mV);
actual_speed_rpm = FOC_GetSpeedRPM();
// 速度PI调节 (输出Iq参考)
Speed_PI_Control();
// 电流环PI (Id=0 或 MTPA)
FOC_CurrentLoop();
// 空间矢量SVPWM,更新占空比
FOC_UpdatePWMDuty();
// 堵孔/堵转保护 (根据转速变化率或功率阈值)
if (Check_Stall_Condition()) {
stall_protect_cnt++;
if (stall_protect_cnt > 10) {
Motor_Stop(); // 停机保护
start_flag = 0;
}
} else {
stall_protect_cnt = 0;
}
}
/**
* @brief 顺逆风启动算法 (在启动前调用,检测电机旋转方向)
* @retval 1: 成功切入闭环 0: 启动失败
*/
uint8_t Motor_StartWithWindmill(void)
{
uint8_t retry = 0;
int16_t init_speed = 0;
// 1. 检测顺逆风: 通过短时注入高频信号或通过反电动势采样
init_speed = FOC_DetectRotationSpeed();
if (abs(init_speed) > WINDMILL_START_THRESHOLD) {
// 电机正在旋转,直接切入闭环 (顺逆风启动)
FOC_SetObserverInitialAngle(init_speed > 0 ? ESTIMATE_ANGLE : -ESTIMATE_ANGLE);
FOC_EnableClosedLoop();
} else {
// 静止启动: 自收敛开环强拖
FOC_OpenLoopStart();
while (!FOC_IsClosedLoopReady() && retry++ < 200) {
delay_us(100);
}
if (!FOC_IsClosedLoopReady()) return 0;
}
start_flag = 1;
return 1;
}
/**
* @brief 速度PI控制器 (与功率限制融合)
*/
static void Speed_PI_Control(void)
{
static int32_t integral = 0;
int32_t error = target_speed_rpm - actual_speed_rpm;
int32_t output;
// 比例系数Kp=0.8,积分系数Ki=0.05
output = (error * 8) / 10 + integral;
integral += (error * 5) / 100;
// 限制输出电流 (对应力矩)
if (output > MAX_IQ_REF) output = MAX_IQ_REF;
if (output < -MAX_IQ_REF) output = -MAX_IQ_REF;
FOC_SetIqReference(output);
// 恒功率保护 (根据输入功率调节目标转速)
uint32_t input_power = (dc_bus_voltage_mV * phase_current_A) / 1000; // mW
if (input_power > MAX_POWER_LIMIT_mW) {
target_speed_rpm -= 200; // 主动降速,防止过功率
if (target_speed_rpm < MIN_SPEED_RPM) target_speed_rpm = MIN_SPEED_RPM;
}
}
/**
* @brief 堵孔检测 (转速快速下降且电流上升)
*/
static uint8_t Check_Stall_Condition(void)
{
static uint16_t last_speed = 0;
int16_t delta_speed = last_speed - actual_speed_rpm;
last_speed = actual_speed_rpm;
// 转速跌落>5000rpm且电流>额定1.5倍
if (delta_speed > 5000 && phase_current_A > OVERCURRENT_THRESHOLD) {
return 1;
}
return 0;
}
/* 中断处理 (PWM周期中断触发ADC读取) */
void PWM_IRQHandler(void)
{
if (PWM_GetTriggerFlag()) {
ADC_StartConversion();
PWM_ClearTriggerFlag();
}
}
/* 主函数示例 */
int main(void)
{
SystemInit();
Motor_Init();
while (1) {
if (!start_flag) {
Motor_StartWithWindmill();
}
Motor_Run();
// 调速命令可通过串口或GPIO电平改变 target_speed_rpm
delay_ms(1);
}
}
深圳市瞰芯科技
原厂授权,正品保障
官方认证一级代理商,芯片可追溯,远离假货风险。
技术驱动,方案落地
从选型、硬件设计、算法到量产导入,200+成功案例。
现货仓储,交期可控
全系列 CMS32M55/M65、CMS80F、BAT32A 现货,准时交付率92.5%。
风险共担,快速响应
7×24h FAE支持,灵活备货,让研发不被芯片卡脖子。
中微单片机开发

-
 中微单片机FOC矢量控制性能评测:实测数据+选型方案+避坑指南 瞰芯科技代理
中微单片机FOC矢量控制性能评测:实测数据+选型方案+避坑指南 瞰芯科技代理中微MCU、CMS32M67xx评测、FOC算法、矢量控制、硬件除法器、MDU加速、PMSM电机控制、BLDC驱动、无感FOC、滑模观测器、电流环、SVPWM、空调压缩机、高速吸尘器、双电机控制、国产电机驱动芯片、STM32替代、电机控制选型
2026.7.17
-
 中微CMS32M5533锂电电钻方案 + CMS8S3680电源控制系统 ——两块板子的完整接线、调试与踩坑记录
中微CMS32M5533锂电电钻方案 + CMS8S3680电源控制系统 ——两块板子的完整接线、调试与踩坑记录分享中微半导体CMS32M5533(ARM M0)锂电无刷电钻驱动方案与CMS8S3680(51核)四路智能电源控制系统的项目实战。涵盖引脚分配、关键参数配置、FOC调试、ADC基准漂移、I2C上拉、烧录脚复用等踩坑记录,附选型建议与成本对比。适合电机控制、电源设计工程师参考。
2026.7.12
-
 中微单片机Pin-to-Pin替换方案 | 国产替代STM32选型指南
中微单片机Pin-to-Pin替换方案 | 国产替代STM32选型指南芯片缺货潮下中微单片机如何Pin-to-Pin替换STM32?本文详解CMS32F030、CMS32F103等6组型号兼容对照、成本可降35%-50%、迁移仅需1-4周。中微授权代理商提供免费样片和技术支持。
2026.6.28
-
 中微单片机原理及应用例程 | GPIO/ADC/PWM/UART项目基础开发实践
中微单片机原理及应用例程 | GPIO/ADC/PWM/UART项目基础开发实践中微单片机原理及应用例程详解,涵盖GPIO、定时器、ADC、UART、PWM等核心外设,提供完整的开发流程与实战代码示例,助力工程师快速掌握国产MCU开发
2026.6.20
-
 中微CMS8S3680 1T 8051单片机:12位ADC+PGA,±0.5℃测温,工业级-40~105℃
中微CMS8S3680 1T 8051单片机:12位ADC+PGA,±0.5℃测温,工业级-40~105℃中微半导体CMS8S3680/69xx系列增强型1T 8051单片机,48MHz主频,12位ADC+PGA实现±0.5℃测温,6路PWM,引脚灵活映射,适用于电源管理、智能温控、工业控制等场景。含NTC测温代码示例
2026.6.19
-
 中微半导MCU支持哪些开发环境?Keil C51 MDK调试下载与选型支持说明
中微半导MCU支持哪些开发环境?Keil C51 MDK调试下载与选型支持说明中微半导MCU(CMS32M57xx/CMS80F751x)开发环境详解:Keil C51/MDK支持包安装、J-Link/CMS-ICE8-Pro调试下载、量产烧录方案及国产替代选型。附例程代码与数据手册,助工程师快速上手。
2026.6.13
-
 中微触摸单片机CMS79FT726B怎么样?国产触摸MCU真实应用价值与选型指南
中微触摸单片机CMS79FT726B怎么样?国产触摸MCU真实应用价值与选型指南瞰芯科技是中微半导代理商,深度解析中微触摸单片机CMS79FT726B,从智能风扇、小家电等真实量产案例出发,分析国产触摸MCU的灵敏度、抗干扰、防水、成本与选型要点,为产品工程师提供实用参
2026.6.13
-
 CMS32L051 电源管理深度解析:4.5µA 部分掉电睡眠模式 | 瞰芯-中微半导代理
CMS32L051 电源管理深度解析:4.5µA 部分掉电睡眠模式 | 瞰芯-中微半导代理瞰芯科技-中微半导代理深入剖析 CMS32L051 电源管理架构:内部LDO、POR复位、LVD电压检测、三种低功耗模式对比、深度睡眠部分掉电配置流程、唤醒恢复机制及电池续航精确计算。从寄存器到实战,完整工程笔记。
2026.6.10
-
 CMS32L051低功耗MCU:可配置时钟树架构与多场景应用解析
CMS32L051低功耗MCU:可配置时钟树架构与多场景应用解析CMS32L051低功耗MCU基于ARM Cortex-M0+内核,主频64MHz,集成HOCO/HSE/LSE/LSI四类时钟源,支持Run/Stop/DeepSleep动态功耗管理,内置12位ADC、温度传感器、多种通信接口,广泛应用于智能家居、工业物联网、电池供电设备等场景。
2026.6.10